Export as PDF, XML, TEX or BIB
Journal Articles
2018
[] 
Direct Sparse Odometry , In IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018.
2014
[] 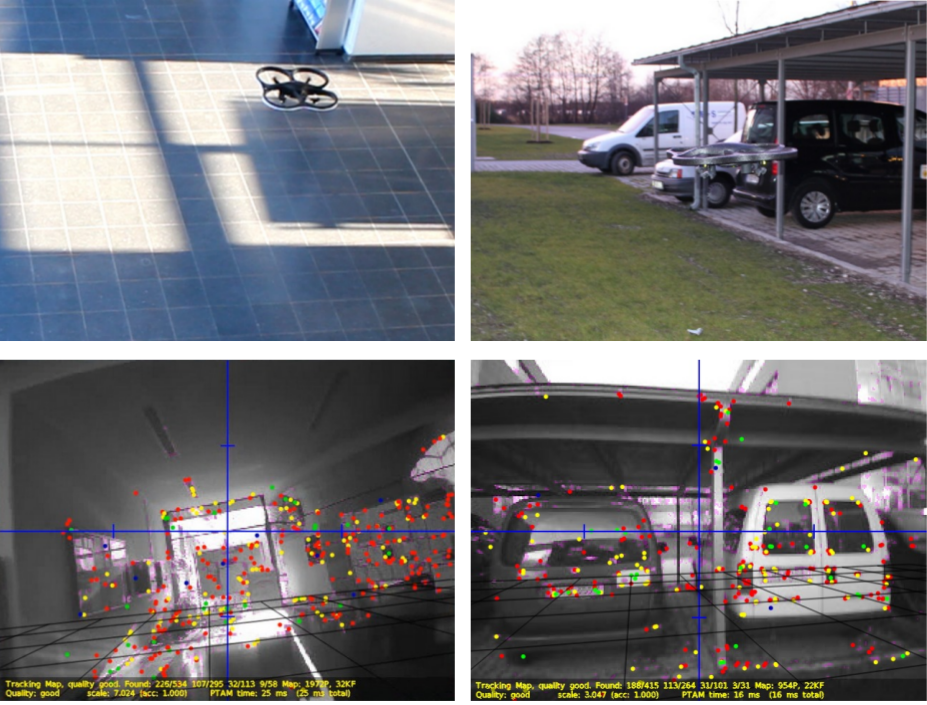
Scale-Aware Navigation of a Low-Cost Quadrocopter with a Monocular Camera , In Robotics and Autonomous Systems (RAS), volume 62, 2014.
Conference and Workshop Papers
2017
[] 
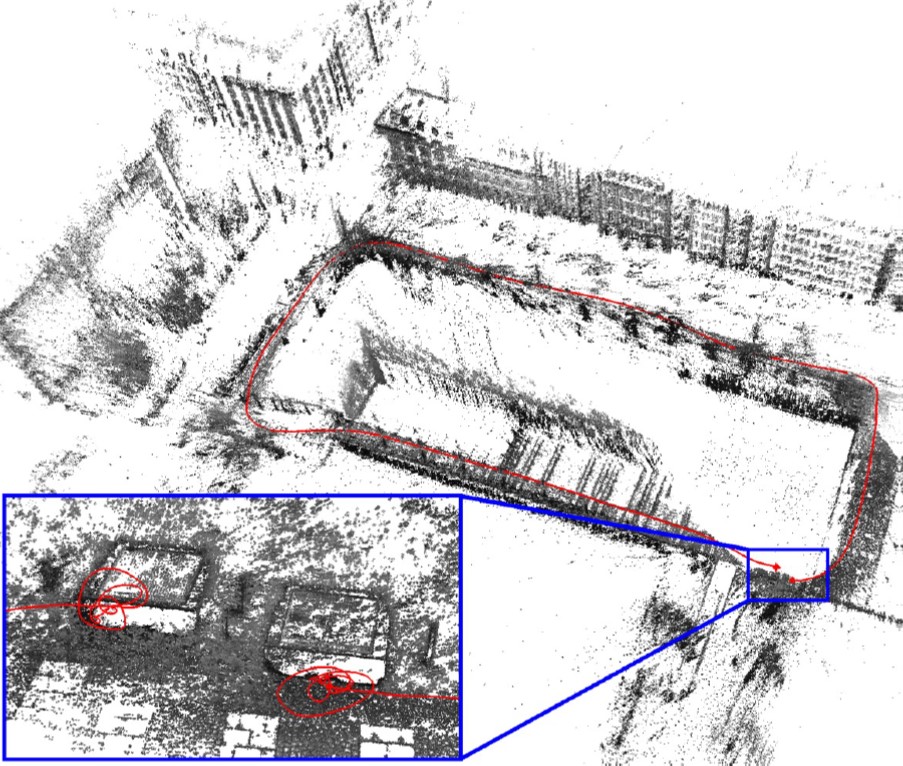
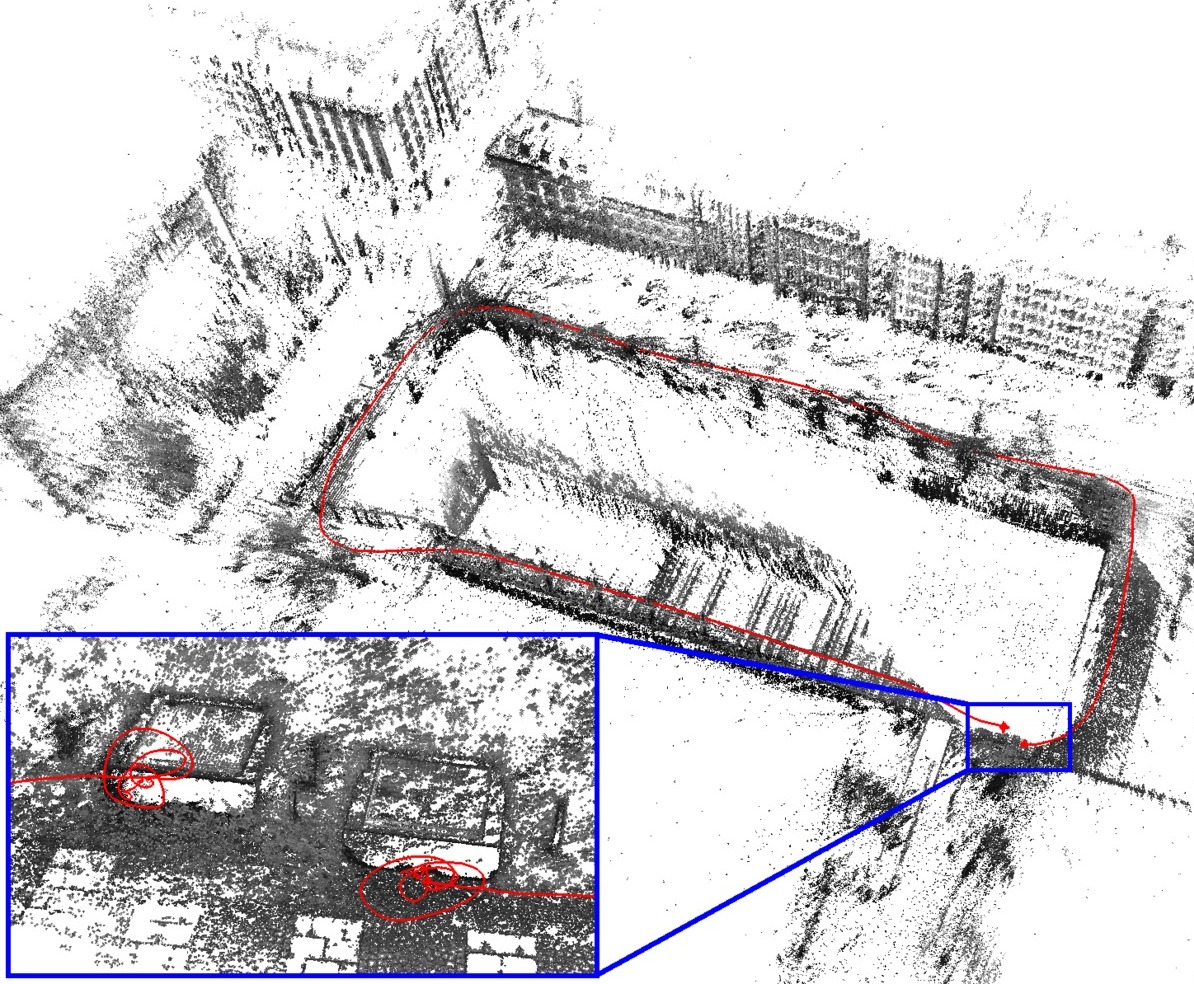
From Monocular SLAM to Autonomous Drone Exploration , In European Conference on Mobile Robots (ECMR), 2017. ([arXiv])
2016
[] 
Direct Sparse Odometry , In arXiv:1607.02565, 2016.
[] 
A Photometrically Calibrated Benchmark For Monocular Visual Odometry , In arXiv:1607.02555, 2016.
[] 
Direct Visual-Inertial Odometry with Stereo Cameras , In International Conference on Robotics and Automation (ICRA), 2016.
2015
[] 
Reconstructing Street-Scenes in Real-Time From a Driving Car , In Proc. of the Int. Conference on 3D Vision (3DV), 2015.
[] 
Large-Scale Direct SLAM for Omnidirectional Cameras , In International Conference on Intelligent Robots and Systems (IROS), 2015.
[] 
Large-Scale Direct SLAM with Stereo Cameras , In International Conference on Intelligent Robots and Systems (IROS), 2015.
2014
[] 
Visual-Inertial Navigation for a Camera-Equipped 25g Nano-Quadrotor , In IROS2014 Aerial Open Source Robotics Workshop, 2014.
[] 
Semi-Dense Visual Odometry for AR on a Smartphone , In International Symposium on Mixed and Augmented Reality, 2014.
Best Short Paper Award [] 
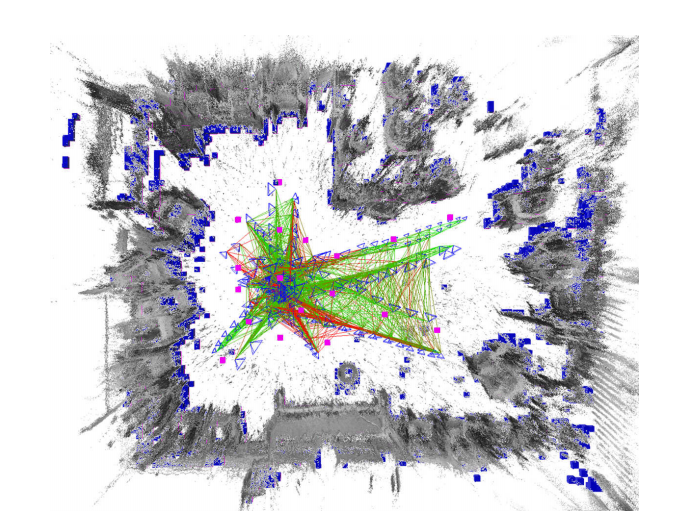
LSD-SLAM: Large-Scale Direct Monocular SLAM , In European Conference on Computer Vision (ECCV), 2014.
Oral Presentation
2013
[] 
Semi-Dense Visual Odometry for a Monocular Camera , In IEEE International Conference on Computer Vision (ICCV), 2013.
2012
[] 
Accurate Figure Flying with a Quadrocopter Using Onboard Visual and Inertial Sensing , In Proc. of the Workshop on Visual Control of Mobile Robots (ViCoMoR) at the IEEE/RJS International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
Camera-Based Navigation of a Low-Cost Quadrocopter , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
Other Publications
2011
[] 
Autonomous Camera-Based Navigation of a Quadrocopter , Master's thesis, Technical University Munich, 2011.
Distinguished with the SIEMENS award for best Master's Thesis 2012
Computer Vision & Artificial IntelligenceTUM School of Computation, Information and Technology
Technical University of Munich
Technical University of Munich
Links
Informatik IX
|
|
Rechte Seite
Informatik IX
|


